25
Jan 12EV Talk
Had a good time last night at the Tokyo Hackerspace giving a short talk on Electric Vehicle tech and how to convert a motorcycle. Slides can be downloaded here,

more about my conversion in the original post
–Z
Had a good time last night at the Tokyo Hackerspace giving a short talk on Electric Vehicle tech and how to convert a motorcycle. Slides can be downloaded here,
more about my conversion in the original post
–Z
A recent news article got me thinking about Geiger readings in Japan, after a bit of Googling I came across some cool things like an upcoming Geiger shield from the Tokyo Hackerspace, and an aggregate data feed from Pachube with nearly 500 live datapoints. Excited to have all this data I decided to whip up something simple (in Processing) to plot it all on a map. I’ve been looking into to applying a predictive modeling construct (perhaps something like an ensemble Kalman filter with an atmospheric dispersion model for Cesium 137), to be able to plot the theoretical radiation levels in all of Japan. I tried modeling it simply with exponential decay, but the results were pretty abysmal.. hopefully I’ll hear back from my environmental studies contact and have something legitimately cool to show you shortly.

Now that I’m back in the business of keeping an up-to-date blog , here is a post describing in more detail the research I worked on during my stay in Japan. Of course the best, and unabridged version can be read here , or the slides from my talk here.
But in short, the work I did with the Osuka-Ishikawa Robotics Laboratory was on passive dynamic locomotion, and more specifically with what is being called the Phase Transition Phenomenon. As I described briefly in a previous post, the idea behind passive dynamic locomotion is that machines can be created which ‘walk’ passively; ie without the standard array of sensors/actuators that are typically required for this sort of task. Through clever mechanical design the control is implied in the physical structure and thus it is said that the system utilizes morphological computation to control motion. Of course these robots must be placed on an incline such that their decent down the slope allows them to regain the energy lost through the inelastic foot collisions. Furthermore, devices of this sort have started to be developed which are able to walk as well as run (running implies a phase of motion in which both feet are off of the ground) depending on the incline angle. Here is a video from another lab which has collaborated on some of this research:


Morphology Evolution of a Passive Dynamic Walking Machine from Z R on Vimeo.
I know.. this update is wayyy overdue … I’ll try to make it a good one.
So my research here in Japan (the Osuka-Ishikawa Robotics Laboratory at Osaka University) is on passive dynamic locomotion, and more specifically with what is being called the Phase Transition Phenomenon. Although it may seem like blasphemy, these are robots that are generally without the sensors/actuators/other electronics that are normally standard (as fate would have it, this is a Mechanical Engineering lab). However this is actually what makes passive dynamic locomotion pretty damn cool. Here is a video that helped to inspire much of this research:

Basic PDW quadruped with locking spine and adjustable leg length


a few more passive and quazi-passive dynamic walkers


One of a series of “rescue robots” in the lab. This one is intended to retrieve an injured person from a hazardous area.


two more rescue robots, MOIRA and MOIRA II, which would (in theory) navigate through rubble after an earthquake or other disaster to locate survivors

another rescue bot which could remove large pieces or ruble and debris more carefully than standard excavation equipment

although not strictly a rescue robot, this critter is capable of traveling through pipes of variable diameter. Its purpose is to locate a gas leak without [potentially] having to tear up a whole neighborhood.

a pretty neat little omiyage I scored while helping clean out one of the other labs- the device (invented by one of the professors here) allows a robot to capture a 360 degree view of its environment (and thus self localize)using only one camera
There are also some awesomely cool clubs around campus; Below are pictures of the work in progress formula racer (OFRAC) and birdman glider.

I’ll be going back this weekend to help fab the main cowling – although I don’t really have the time, I’m going to try to become a regular member – wayy to cool an opportunity to pass up





The Osaka-U robocup team lab a few days before the event


‘bots being demonstrated at the entrance- one even danced like MJ!


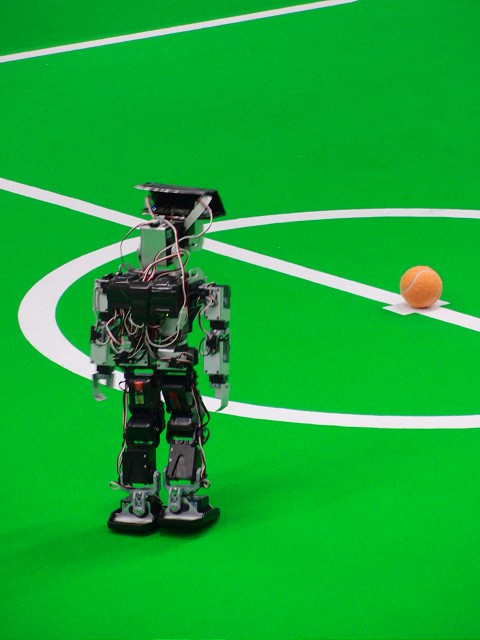


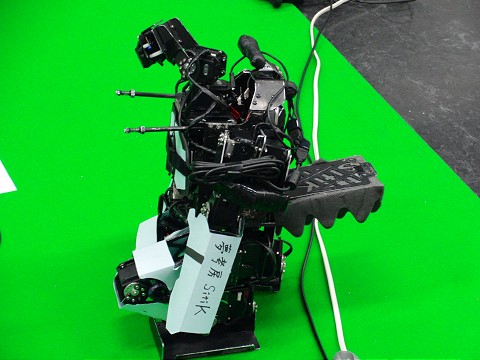

A few of the different humanoid competitions

medium sized non-humanoid class

Mixed Reality class – miniature robots compete on the virtual field shown(!!)













at these temples, you can pay a couple bucks for an old lady to read your fortune – I’ll let you draw your own conclusions.
retaliation gift in to say “thanks” for the gifts i brought from California. Now the ball is in my court. apparently thankyouforthe-thankyouforthe-thankyou gifts are not uncommon here

Umeda
enticing?

more enticing?





More Umeda

Namba
Making friends in Namba
Language barrier

I hope they’re not always crusty and filled with yellow cream

wtf?


Nagisa Ongakusai 2010 – Japanese Ravebot



More Nagisa Ongakusai

more wtf?



Super-Position?
Apparently Robot dogs do this too..
Do you have survive?

“Philosophers have only interpreted the world in various ways. The point is to change it”
Sooo badass.

They’ve even taken our idea of consumerism to a whole new level!
Anyways, after an 11 hour flight from LAX to NRT things went relatively smoothly through customs and I was able to take a train to the gargantuan Tokyo Station then Musashino city, where I stayed at a hotel next to a Mustache Pub.

The room was pretty much what I expected of a Japanese hotel room; about the size of a large American closet, with enough room for a small bed, TV, dresser, and bathroom (complete with a toilet that warms your butt and squirts your asshole). Down the hall was one of the fabled vending machines, from which ¥300 could produce a cold BEER! Much less notably (but still pretty cool), vending machines in Japan can provide beverages (mainly tea and coffee) warm as well as cold.

I should also note: sorry that this initial batch of pictures are of such shit quality. I came to Japan under the impression that in Japan there would be unique, new cameras , not [yet] available in the US, and they would be cheap! This is almost entirely wrong. Because Japan has become just as much of a wealthy consumerist nation as we are, camera retailers realized that they could charge just as much , and in some cases more, for cameras in Japan than in the US. The fact that the Yen is now beating the Penny, doesn’t exactly help this. There are still a few models that are only available here, but pretty much everything you can get in the states. If you are going to visit Taiwan it is a different story, but for Japan, bring a camera. Despite this, I am still going to get one (possibly two) eventually, but for now I’m stuck with mediocre camera phone shots.
I only had about a day to roam around Tokyo – during which I walked with some friends from Shinjuku station to Roppongi, stopping for food and bouts of Pachinko along the way. We visited the Tokyo Tocho (aka “Tax Tower”) government building observation deck, which had a view that was pretty damn special.

Suffice to say, we split that scene and found nerdy-redemption behind a sign like the sign below:



Later in the afternoon we took the Tokyo-Osaka Bullet train. With a cruising speed of 300kph this train would keep up with (if not outrun) most Liter-bikes! Not to mention it runs so smoothly you can hardly tell you’re moving.


We stopped by a pet store and saw some very unique animals you would be hard pressed to find in America. Even puppies are very expensive here, although they (as was observed) still like to eat their own shit. Some pictures of the animals are posted below:




I meet with my Research Supervisor tomorrow, and still have some reading I would like to do, so I’ll cut it off here for now. I’ll do my best to keep this site updated with info on Japan and what I am working with in lab, so stay posted!